ai
AI-Powered LiDAR: A New Era of Perception
How AI and ML enhance LiDAR technology by overcoming data processing challenges, enabling advanced applications in autonomous systems, robotics, and 3D mapping, and more.
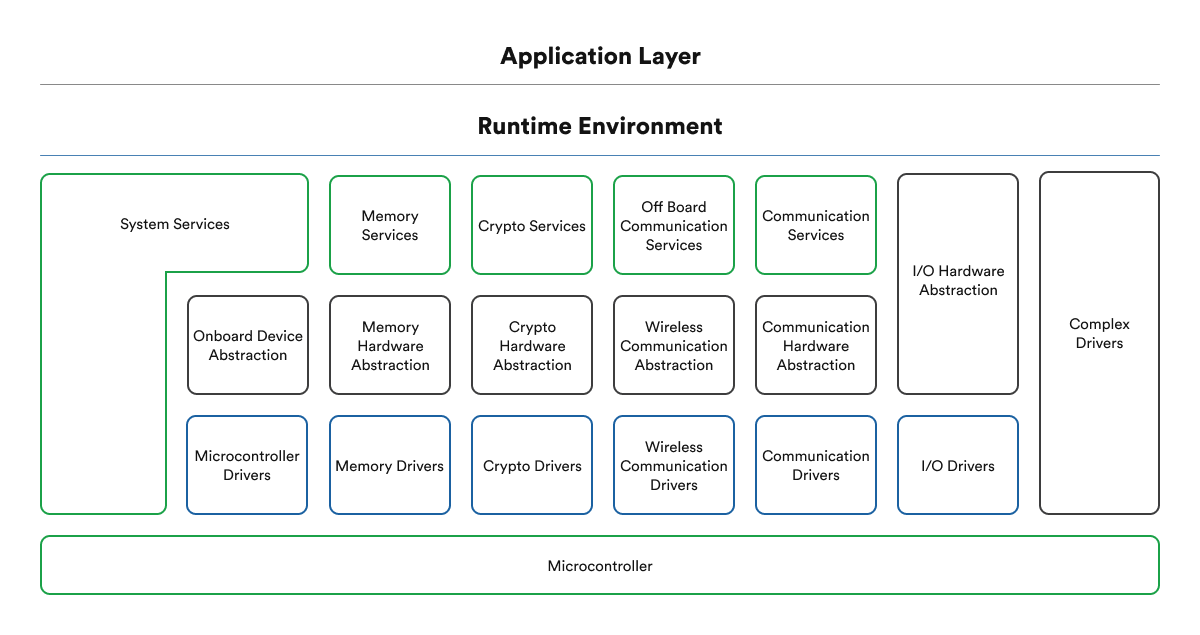
The adaptive architecture of AUTOSAR comes with a central application server that facilitates high-performance computing. The Ethernet-based ECUs in this system support real-time functions. Adaptive AUTOSAR is scalable and has a dynamic architecture where applications can be updated throughout the vehicle’s life cycle. This allows OEMs to deploy high-tech software features in the car and update them wirelessly when needed.
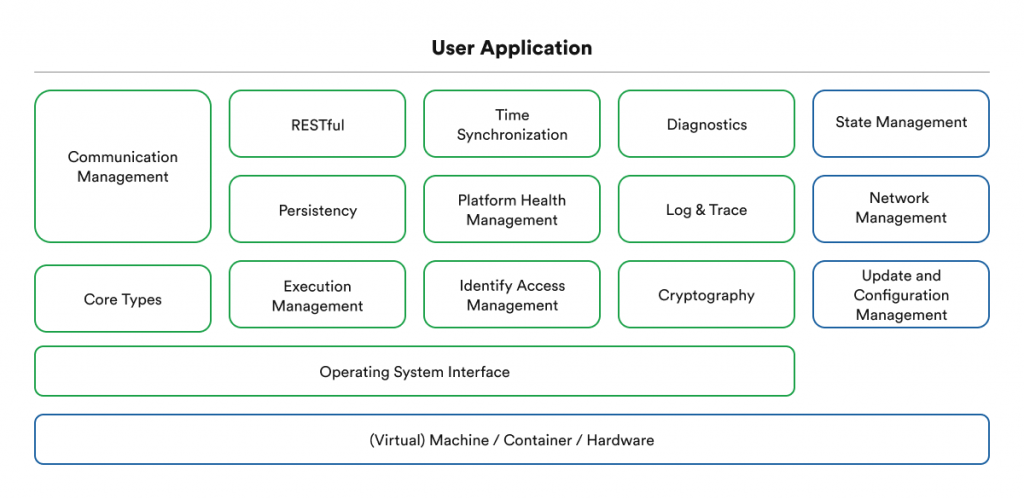
The AUTOSAR Adaptive Framework implements the AUTOSAR Runtime for Adaptive Applications (ARA). Two types of interfaces are available: services and APIs. The platform consists of functional clusters that are grouped into services and the AUTOSAR adaptive basis.
Functional clusters
Compared to the classic AUTOSAR framework, the AUTOSAR runtime for the Adaptive Framework dynamically binds services and clients at runtime.
How AI and ML enhance LiDAR technology by overcoming data processing challenges, enabling advanced applications in autonomous systems, robotics, and 3D mapping, and more.

Offering insights into how the latest AI advancements will impact consumers, manufacturers, and the broader environment in 2025 and beyond.

Showcasing the environmental and economic benefits of integrating sustainable materials and robust recycling practices into the automotive value chain.